ガイド鏡はFC60NZ(タカハシ)を使用し焦点距離は500mmである。k-Astec の鏡筒バンドを使いプレートにガイドマウントを使用せずに直付けである。ガイド用カメラ:MTV-73S85HN-BSの蓄積時間を1067mSec(64×)で使用したとき約8等星までガイド可能である。ほぼガイド星がみつかるがイメージシフトを使用してガイド星を探すこともある時々ある。現在はガイド用カメラをQHY5L-Ⅱに変更した。ε250-C+冷却CCDカメラ:STL-11000Mでの撮影ではセルフガイドによってガイドするのでこのガイドシステムは使用することはなくなった。しかし、彗星の撮影ではε250-C+デジタル一眼を使うときにはこのシステムは威力を発揮する。

②PROMINAR 350mm F4を50mm f=200mmガイド鏡でガイドする(赤道儀はEM-100 タカハシ)
ガイド鏡は小型軽量の口径50mmのファインダーにガイド用カメラ:QHY5L-Ⅱを取り付けたものでPROMINAR 500mm F5.6 FL(TX-07:350mm F4)+EOS6D(SEO-SP4)をガイドする。赤道儀はEM-100(タカハシ)である。EM-100は小型であるがガイド精度の良い赤道儀である。EM-100はE-ZEUSⅡ改造を行い自動導入化した。
・明るい星に向けてバーティノフマスクでピント合わせをする。
↓
・撮影天体を自動導入
↓
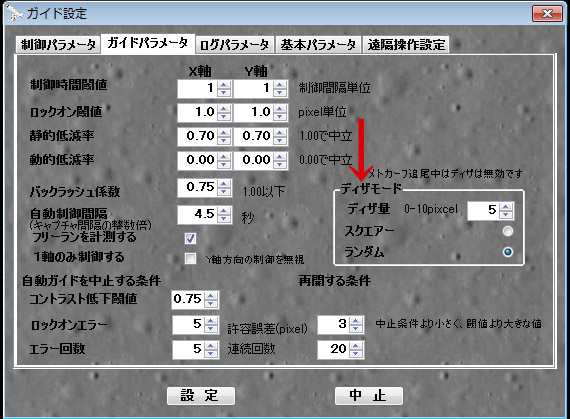
・ディザガイドの機能を活用して撮影
↓
・撮影終了後明るい星に向けてピントチェック
↓
・撮影天体を自動導入
↓
・ディザガイドの機能を活用して撮影
これを繰り返すためには自動導入は必須である